Простой доплеровский пеленгатор PA3BNX на Arduino
PA3BNX
https://a43.veron.nl/projecten/doppler-peiler-pseudo-doppler-radio-direction-finder-rdf/
"SoundDoppler" - программа Lodewijk Baars PA3BNX, имитирующая доплеровское оборудование.
Псевдодоплеровский метод представляет собой основанный на фазе метод пеленгации, который дает оценку азимута принятого сигнала путем измерения доплеровского сдвига, вызванного сигналом путем дискретизации вокруг элементов круговой решетки. В исходном методе использовалась одна антенна, которая физически перемещалась по кругу, но в современном подходе используется круговая решетка с несколькими антеннами, при этом выборка каждой антенны выполняется последовательно.

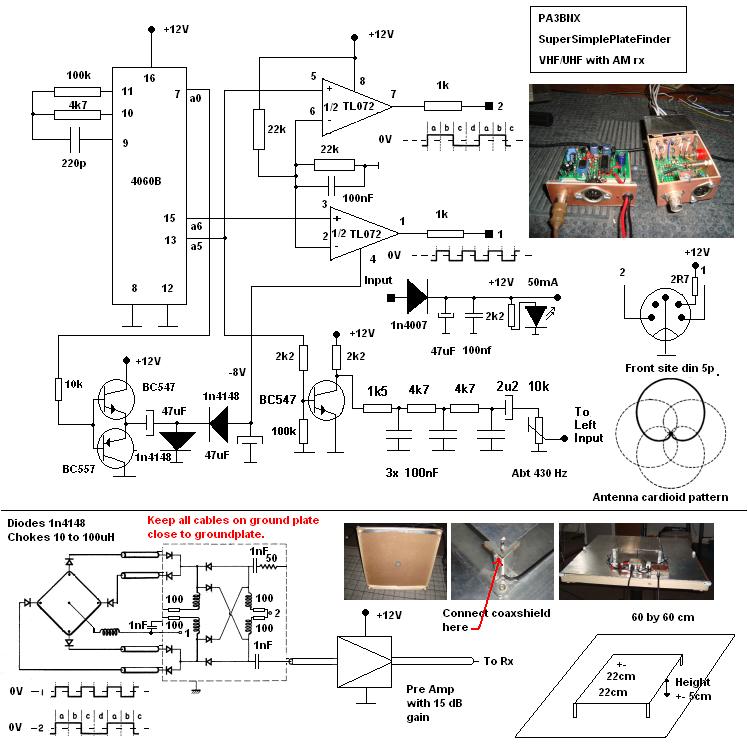
VHF/UHF DSP пеленгатор, подключенный к звуковой карте ПК.

ВЧ пеленгация
Sound-Doppler можно использовать и для Mobile Foxhunt.
Назначение
Заменяет традиционное оборудование доплеровского декодирования звуковой картой. Эту программу также можно использовать отдельно при стационарном доплеровском мониторинге. Нужен линейный стереовход на звуковой карте. Для этого требуется опорный синусовый сигнал, зафиксированный на доплеровском переключателе, на левом канале и демодулированный FM-Rx-аудио на правом канале. Предполагается, что опорный сигнал находится в диапазоне 300-2300 Гц.
Arduino shield
Вот изображение ноутбука под управлением Win7 и MyMapping.exe и рабочие схемы на макетной печатной плате.
Все схемы работают от USB-порта ноутбука.
Подключен к Arduino uno rev3 с 10 светодиодами Homming в Пелоре (lm3914)
Это действительно сработало 13 сентября в Нидерландах с охотой на лис на воздушном шаре…

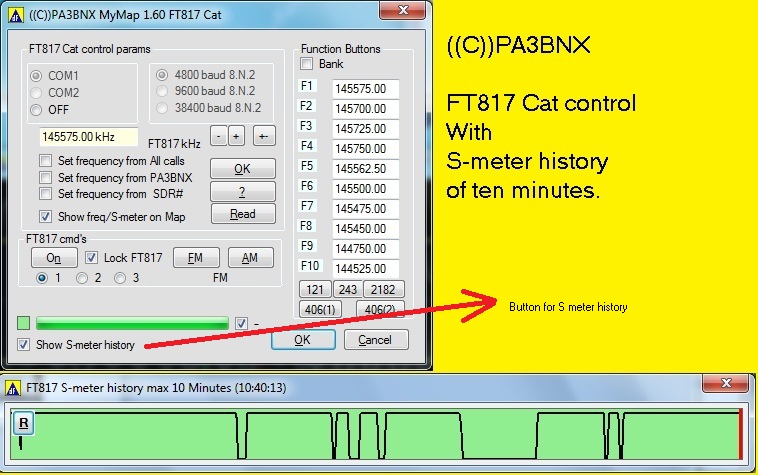
Работа программы с трансивером FT817
- SoundDoppler и MyMapping (печатные платы и инструкции по установке включены в файл .zip)
Скетчи для Arduino
(Материалы с форума https://forum.arduino.cc/t/radio-direction-finding/312783)
Исправил некоторые ошибки в написанном мной Sketch (июль 2015).
Теперь работает вполне нормально!
Теперь вы можете включать и выключать через программу termianl также средний показатель.
Arduino3.ino (21,2 КБ)
Я исправил некоторые ошибки в SuperSimpleArduinoDoppler (август 2015).
Теперь он работает правильно CW / CCW с плоской антенной и режимом AM-приемника.
И у него была ошибка обнаружения MultiPath, которая также исправлена ????в этом скетче.
Arduino4.ino (22 КБ)
Обновления от моего доплера Arduino теперь с а Homming в lm3914 10* привело пелорус (август 2015).
Arduino5.ino (22 КБ)(23,6 КБ)
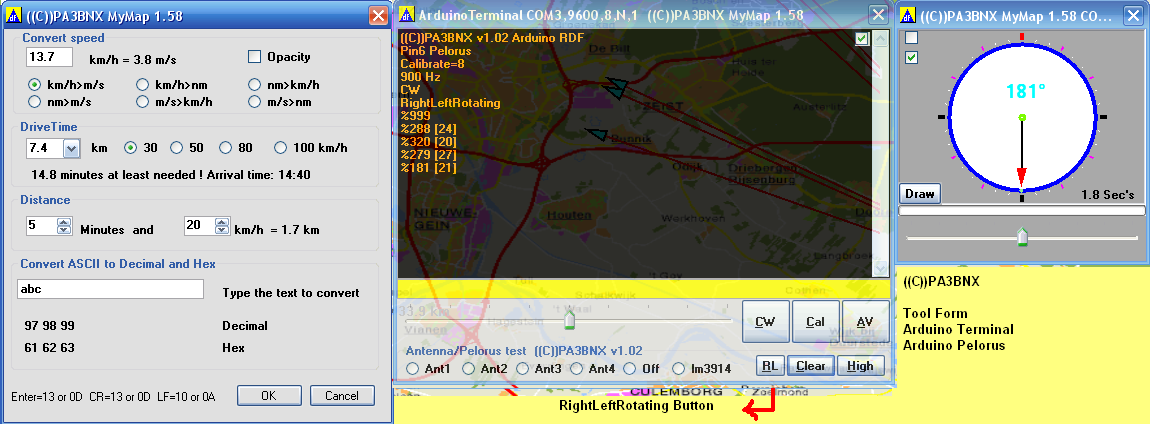
Сегодня я написал RightLeftRotating в Arduino.ino. (сентябпь 2015)
С помощью команды R в ArduinoTerminal или кнопки RL (в новом MyMapping.exe) вы можете изменить последовательность вращения доплеровской антенны из антенной решетки.
1234 1234 1234 1234 до
1234 3214 1234 3214
Итак, один раунд вправо, а затем один раунд назад, чтобы начать ситуацию
В чем преимущество этого?
Кривая частотного дискриминатора в приемнике может иметь неправильное измерение, если она несимметрична.
Это происходит, когда приемник не точно настроен на центральную частоту передачи или когда S-кривая частотного дискриминатора не является линейной.
Вращая вверх и вниз, вы можете усреднять +/- ошибки частотного дискриминатора.
Если вы переключаетесь между NormalRotation и RightLeftRotation, вы слышите, что частота допплеровского тона уменьшается вдвое.
Градусы пелоруса остаются прежними
Конечно, регулировка по часовой/против часовой стрелки остается прежней.
Также с пластинчатой ??антенной это возможно, но не даст пользы с АМ-детектором.
Если вы переключитесь на RightLeftRotation, вы не сможете использовать Arduino на звуковой карте с моей программой soundDoppler.exe.
Так что переключитесь обратно на NormalRotation