RDF40
PA8F
https://radiodirectionfinding.wordpress.com/rdf40/
Тщательно избегая использования микроконтроллеров в своих доплеровских проектах RDF, в апреле 2015 года я начал этот новый проект: автономный радиопеленгатор на основе микроконтроллера. Этот RDF должен иметь возможность использовать принцип Доплера, а также принцип амплитуды, в зависимости от присоединенной антенной решетки.Давайте сначала проясним одну вещь:
нет никаких причин, по которым RDF на основе микроконтроллера будет работать лучше, чем RDF, построенный из простых цифровых и аналоговых компонентов. Лишь расчетная возможность могла дать небольшое преимущество в интерпретации сигнала и усреднении результата.Однако самым большим преимуществом будет пользовательский интерфейс: с помощью графического экрана пользователю может быть представлено гораздо больше данных в очень удобной для пользователя форме. Меню могут обеспечивать легкий доступ к настройкам RDF, а пользовательские настройки можно сохранять. И данные могут быть предложены внешнему миру, переданы в сеть и т. д.
Таким образом, эти преимущества вдохновили меня начать этот новый подход.
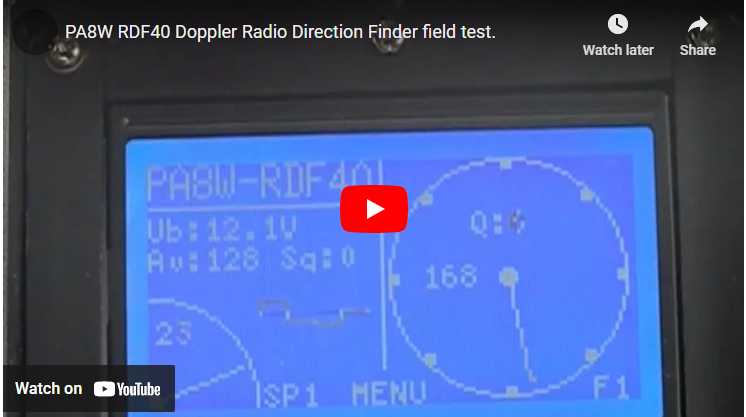
В следующем довольно плохом ролике на Youtube вы можете увидеть первый прототип в действии на частоте 424 МГц как в простой, так и в жесткой, рефлексивной среде:
Я использовал этот RDF40 в качестве платформы для разработки, так как практически все параметры доступны через структуру меню. Поэтому он был и до сих пор прекрасно подходит для экспериментов с другими антенными решетками и альтернативными программными алгоритмами.
Это привело к значительному повышению производительности мобильной работы RDF, поскольку программное обеспечение способно подавлять многие помехи, связанные с многолучевым распространением, характерные для мобильной работы. Кроме того, RDF может отправлять свои лучшие пеленги на ноутбук, который может отображать линии пеленга на карте. Это программное обеспечение разработано как мощный инструмент для мобильной работы с RDF.
Теперь, после примерно 2,5 лет экспериментов и испытаний, я разработал RDF41, упрощенный процессор RDF с лучшими настройками, зафиксированными в его прошивке. Поэтому время от времени я строю один или два RDF41 для тех, кому это интересно.
- Сам RDF40 недоступен, как и никакой документации.
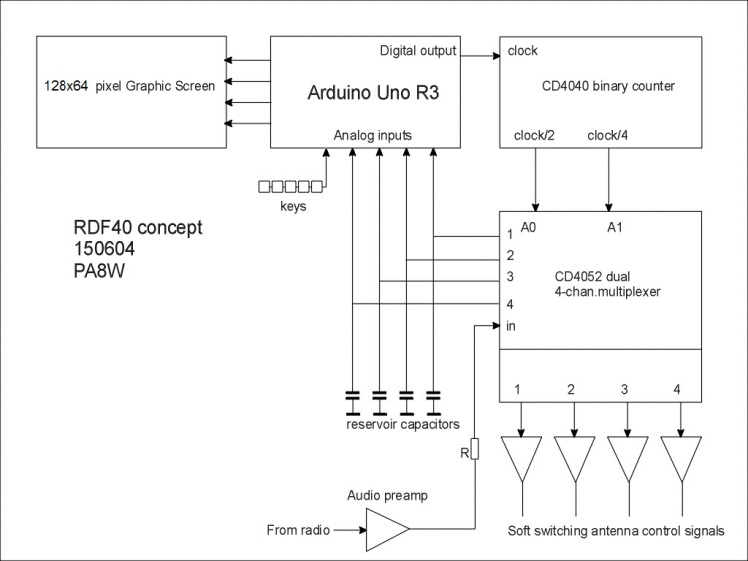
- Ядром этой конструкции является Arduino Uno R3, выбранный из-за простоты программирования.
- Результат отображается на графическом экране размером 128x64 пикселей.
- Я выбрал монохромный с подсветкой: никаких проблем с видимостью в мобильных приложениях. Arduino отправляет тактовый сигнал на двоичный счетчик, который обращается к двойному 4-канальному мультиплексору.
- Один из мультиплексоров используется для управления антенными драйверами с программным переключением. Второй мультиплексирует усиленный радиовыход на четыре конденсатора, которые собирают сигналы X+, Y+, X- и Y-.
Таким образом, данные всех 4 антенн хранятся в собственном конденсаторе, который выполняет некоторое начальное усреднение.
Эти четыре конденсатора считываются аналоговыми входами Arduino примерно 8 раз в секунду. Arduino вычисляет разницу между X= и X- и делает то же самое для Y+ и Y-. Это дает значения X и Y без смещения постоянного тока. По этим значениям X и Y рассчитывается необработанная оценка подшипника, и, конечно же, выполняется множество дополнительных расчетов для расчета достоверности образцов.
- усредненное значение за определенное время,
- экранные положения индикаторов,
- положения области экрана,
- позиции текстов в пилории в зависимости от показателей пилоруса,
- и т.д.
Я разработал интерфейсную печатную плату (слева) того же размера, что и графический экран (справа).
Ряды контактов на печатной плате соответствуют шине Arduino, а плата Arduino просто прикрепляется к задней части интерфейсной печатной платы.Собранные вместе, три платы образуют компактный сэндвич.
Из материала PCB я сделал временный корпус.
Пять кнопок находятся на отдельной небольшой печатной плате перед платой экрана.Кнопки обеспечивают быстрый и легкий доступ ко всем настройкам.
На картинке показан главный экран текущей версии.
- Левая часть показывает:
- Введите номер,
- Напряжение батареи и частота вращения,
- Настройки среднего значения, шумоподавления и калибровки,
В левом нижнем углу показан индикатор возвышения для воздушных целей. Рядом с этим индикатором простой вектороскоп показывает текущее значение четырех антенн: X+, Y+, X-, Y-
RDF выполняет четыре измерения каждые полсекунды.
Используя эти данные, выполняется расчет SinCos и определяется качество (добротность) каждого измерения.
Четыре оценки азимута отображаются в пелорусе в правой части экрана.
Длина каждой линии пеленга определяется добротностью измерений.
Таким образом, хорошее измерение показывает более длинную линию, а кривое измерение показывает короткую линию. Каждые полсекунды наносятся эти четыре измерения, включая линию среднего значения за долгое время.Это среднее значение за долгое время также рассчитывается с использованием коэффициента добротности для взвешивания каждого измерения. Таким образом, измерение высокого качества оказывает большое влияние на среднее значение, а измерение низкого качества практически игнорируется.
Точка в центре пилоруса указывает на то, что измерение было достаточно хорошим, чтобы его можно было принять. Такой общий подход дает быстрое и очень хорошее впечатление о подшипнике и надежности измерений.
Экран МЕНЮ предлагает доступ к:
- Калибровке азимута и высоты
- Уровеню усреднения
- Частоте вращения антенны
- Уровню шумоподавления (FREEZE для сигналов низкого уровня или низкого качества)
- Run (возврат в рабочий режим)
- Находясь в МЕНЮ, тест антенны выполняется в фоновом режиме, в медленном темпе проходя через 4 антенны.
- Таким образом можно четко распознать неисправную антенну.
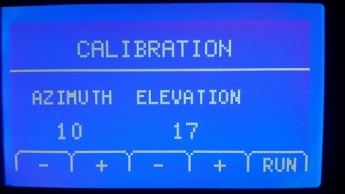
Меню калибровки:
- Простой, но эффективный.
- Калибровка азимута может быть установлена от 0 до 358 градусов с шагом 2 градуса.
- Калибровка высоты является компенсационным фактором, зависящим от выходного сигнала ваших приемников.
Все изменяемые в меню настройки сохраняются в энергонезависимой памяти и будут запомнены при следующем включении RDF.
Меню усреднения:
- Самый низкий уровень = 0 (без усреднения)
- Следующие уровни 16, 32, 64, 128, 256.
- Это количество выборок, объединенных в скользящее среднее.
Значение 64 обычно подходит для мобильных устройств.
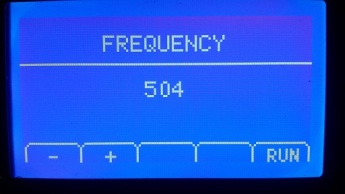
Меню частоты:
От 104 Гц, 112 Гц, 120 Гц до 2040 Гц с возрастающим шагом.
504 Гц — хороший выбор для узкополосных FM-приложений.
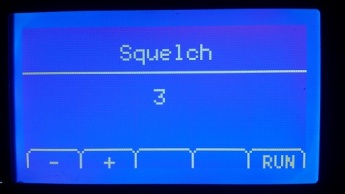
Меню шумоподавления:
В диапазоне от 0 до 9 настройка шумоподавления представляет собой минимальный коэффициент добротности, который должен иметь образец, чтобы он был достоверным.
Образец с Q ниже настройки шумоподавления будет проигнорирован, а точка в центре пелоруса исчезнет, указывая на то, что свежие данные не принимаются и индикатор азимута заморожен.Значение Q отсчетов вычисляется из амплитуды сигнала (доплеровской амплитуды) плюс симметрия отсчетов: Многолучевой доплеровский тон может быть довольно громким, но не очень симметричным. Следовательно, симметрия является хорошим показателем надежности выборки.
Сложный алгоритм используется для объединения как амплитуды, так и симметрии в единую цифру оценки качества «Q», которая также отображается в pelorus.
Измерения показывают, что сам RDF имеет точность в пределах 2 градусов. Однако антенная решетка здесь не принимается во внимание. Допплер с 4 антеннами обычно имеет точность около 5 градусов в хороших условиях.
Любой, кто ездил с RDF в городе или на производстве, знает, что идеальные обстоятельства могут быть далеко-далеко…
![2015-04-1710.35.48[1]](2015-04-172010-35-481.jpg)
![20151016_102243[1]](20151016_1022431.jpg)