Управление шаговым двигателем
В. Рентюк
Шаговые двигатели - это особый класс двигателей постоянного тока. Они кардинально отличаются от привычных коллекторных двигателей. Главное отличие шагового двигателя от двигателей других типов в том, что поворот его ротора осуществляется на некоторый, заданный конструкцией и схемой управления, строго определенный угол (шаг). Отсюда и главное преимущество шаговых двигателей - возможность точно позиционировать положение его ротора и удерживать его в этом положении без использования специальных муфт и тормозов (достаточно просто не снимать напряжение с обмоток). Еще одно важное достоинство двигателей этого типа в том, что максимальный момент ротора достигается на малых скоростях вращения. Это позволяет отказаться от сложных дорогостоящих редукторов, которые трудно изготавливать в радиолюбительских условиях. Эти два основных фактора делают шаговые двигатели незаменимыми при конструировании различных исполнительных механизмов, например, для управления манипуляторами в робототехнике, в станках (для подачи резца или фрезы) и т.п. Отсутствие коллектора делает шаговые двигатели практически вечными.
Как уже отмечалось, шаговые двигатели требуют особых, совершенно иных, чем для коллекторных или многофазных двигателей (с которыми их порой путают), схем управления. Этот факт является основным камнем преткновения особенно для начинающих радиолюбителей или радиолюбителей по той или иной причине не желающих или не имеющих возможностей использовать для этой цели микропроцессорные системы управления.
Однако насколько ли сложны такие схемы управления, всегда ли необходимо применения в схемах управления шаговыми двигателями дорогих специализированных микросхем или микропроцессоров?
Рассмотрим три базовые схемы управления шаговыми двигателями, которые помогут радиолюбителям в их освоении.
На рис. 1 показана простейшая схема управления для униполярных двигателей [1]. Такой двигатель имеет отвод от середины обмотки, что значительно упрощает схему драйвера.
Внимание! В первоисточнике [1] имеются ошибки в подключении IC1.
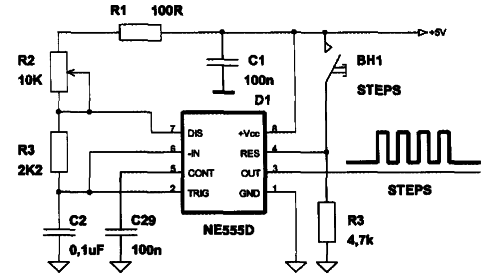
Схема не содержит дефицитных элементов, выполнена на двух ИМС 74-й серии (можно использовать и советские аналоги). Направление вращения двигателя определяется положением переключателя S1 (DIRECTION). Скорость вращения двигателя задается любым внешним генератором импульсов. Такой перестраиваемый по частоте генератор можно сделать, например, на ИМС таймера 555 (рис.2).
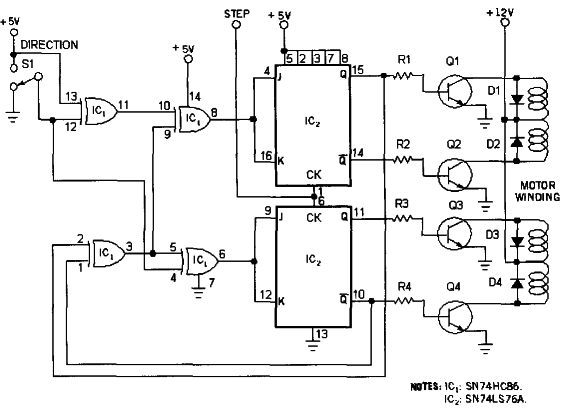
В качестве драйвера Q1-Q4 могут использоваться любые транзисторы с коэффициентом усиления по току не ниже 100 при заданном токе коммутации. Ток определяется сопротивлением обмоток двигателя по постоянному току и его напряжением питания (+12V на рис.1). Но лучше использовать в качестве драйвера подходящие MOSFET, например, IRF7470 (VDSS=40V, R тах=13mОм, lD=10A). Резисторы R1-R4 могут быть номиналом не ниже 470 Ом (в случае использования MOSFET эти резисторы необходимо оставить). В качестве диодов D1-D4, гасящих обратный импульс напряжения, можно использовать недорогие диоды 1 N4007. Две более сложные схемы управления маломощными униполярными и биполярными двигателями можно посмотреть в [2, 3]. Удобный к применению простой и недорогой вариант схемы управления биполярным двигателем с напряжением до 36 В и током до 0,6 А показан на рис.3 [4]. Схема пригодна и в качестве недорогой тестовой платы и обеспечивает работу двигателя в оптимальном пошаговом режиме с перекрытием фаз. Автор использовал схему для управления двигателем малой мощности 20M020D2B 12В/0.1А (каталог Distrelec 37-13-13).
Схема состоит из тактового генератора (IC3-1 и IC3-2), двунаправленного двухфазового формирователя на D-триггерах IC2 (SN74HC74D), схемы выбора направления вращения (IC3-3 и IC3-4) и драйвера IC1 L293DD (SGS-THOMSONMicroelec-tronics). Можно использовать и драйвер L293D (Texas Instruments Inc.). Микросхема драйвера имеет встроенные гасящие (кламперные) диоды и схему теплового отключения, устанавливать ее необходимо с обеспечением теплоотвода, который выполняется проводниками на печатной плате [5]. На схему подается напряжение питания в зависимости от типа двигателя. Питание формирователя осуществляется от стабилизатора напряжения, который должен обеспечить питание +5V на схему управления. В схеме использован недорогой линейный стабилизатор L7805ABD (корпус D2PAK), поскольку ток потребляемой формирователем не превышает нескольких миллиампер, а рабочее напряжение выбранного типа двигателя 12 В.

Включение шагового двигателя осуществляется кнопкой ВН1 или это может быть любой сигнал, например, отдатчика или схемы с открытым коллектором.
Цепь на транзисторе Q1 обеспечивает надежный запуск генератора. Такой принудительный пуск необходим, потому что генераторы, выполненные на основе двух (а не обычных трех) CMOS или TTL инверторов, иногда оказываются неустойчивы после включения (могут возбуждаться с частотой порядка 18 МГц). Команду на включение двигателя нужно подавать с некоторой задержкой после подачи питания. Рекомендуется давать задержку в несколько миллисекунд. Конденсатор С5 устраняет влияние «дребезга» контактов кнопки управления. Вращение ротора двигателя будет осуществляться в течение всего времени пока нажата кнопка или подан сигнала низкого уровня в точку «А». Во втором случае конденсатор С5 не нужен. Направление вращения зависит от положения выключателя S1. Вместо выключателя также могут быть также использованы любые подходящие сигналы, например, от концевого выключателя, выключателя остановки с таймером, пусковым механизмом или любыми цепями с открытым коллектором, подключенные в точку «В» вместо выключателя S1. Светодиод D1 - это индикатор подачи импульсов вращения «STEP». Он светится в режиме вращения двигателя. Скорость вращения двигателя зависит от его технических характеристик (от угла шага) и частоты тактового генератора. Временная диаграмма работы формирователя описываемой схемы управления показана на рис.4.

Если используются двигатели с четырьмя обмотками, то допустимо устанавливать ИМС драйвера L293 в параллель по цепям управления. Каждый драйвер управляет своей парой обмоток. В режиме удержания (режим, когда управляющие импульсы не подаются, но сам формирователь и драйвер не выключены) для уменьшения тока потребления и нагрева двигателя одну из ИМС можно выключать. Для этой цели используют входа EN (выводы 1,9, 11, 19) ИМС одного из драйверов. Такой вариант автором применялся для более мощных гибридных шаговых двигателей серии V9728 12В/0,6А (RS-каталог 440-458). Для двигателей с большим током, например, для гибридного двигателя серии DSH56 5В/1А (аналогичный по RS-каталогу 440-442), особенно если он используются в режиме форсированного начального тока, необходимо использовать драйверы с ограничением максимального тока. Для этих целей можно использовать, например, ИМС драйвера типа LMD18245 (ЗА, 55V) или аналогичный ему. ИМС драйвера типа LMD18245, в отличие от L293DD, является не четырех канальным, а двухканальным драйвером, поэтому для реализации схемы управления требуется две ИМС драйвера. Драйвер LMD18245 выполнен по DMOS технологии, содержит схемы защиты от перегрева, короткого замыкания и выполнен в удобном 15-выводном корпусе ТО-220, что позволяет легко отводить от его корпуса излишнее тепло.
Схема тестовой платы на основе драйвера LMD18245 показана на рис.5. В качестве задающего генератора использовалась схема генератора, приведенная ранее (рис.2), но с увеличенным до 4,7 кОм сопротивлением резистора R2. Для подачи одиночных импульсов используется кнопка ВН1 «Single STEPS», позволяющая сдвинуть ротор двигателя на один шаг. Направление вращения ротора определяется положением переключателя S1. Включение и выключение двигателя осуществляется выключателем S2. В положение «OFF» выключателя ротор двигателя освобождается и его вращение импульсами управления становится невозможным. Режим удержания «HOLD» уменьшает максимальный ток потребления обмотками двигателя с 2 А до 1 А. Если импульсы управления не подаются, то ротор двигателя остается в зафиксированном положении с пониженным вдвое током потребления.

Если же импульсы подаются, то вращение двигателя в этом режиме осуществляется с пониженным на малых скоростях моментом вращения. Необходимо заметить, что поскольку при полношаговом управлении с перекрытием фаз включены обе обмотки, то ток потребления двигателем удваивается, а схема драйвера должна рассчитываться исходя из требований обеспечения заданного тока двух обмоток (резистор R3, R8).
Схема содержит аналогичный, описанному ранее двунаправленный двухфазовый формирователь на D-триггерах ИМС D2 (SN74HC74D) и схему выбора направления вращения (D1 -4 и D1 -2). Максимальный ток драйвера задается резистором, включенным в цепь контакта 13 ИМС LMD18245 (резистор R3, R8) и двоичным кодом на контактах цепи управления тока (выводы 8, 7, 6, 4). Формула для расчета максимального тока приведена в спецификации на драйвер [6]. Ограничение тока осуществляется импульсным методом. При достижении максимально заданной величины тока осуществляется его «нарезка» («chopping»). Параметры этой «нарезки» задаются параллельной RC-цепочкой, подключенной к выводу 3 драйвера. Достоинством ИМС LMD18245 является то, что токозадающий резистор не включен непосредственно в цепь двигателя, имеет достаточно большой номинал и маленькую рассеиваемую мощность.
В заключение необходимо отметить, что шаговые двигатели могут устойчиво работать и на повышенных скоростях вращения, однако это требует уже применения особых схем, реализующих режим так называемого микрошагового управления. В этом режиме на каждый импульс тока ротор поворачивается не на заданный конструкцией двигателя угол (шаг), а на меньший дробный, как правило, равный 1/8, 1/16 или 1/32. Такой режим уменьшает и даже подавляет паразитный резонанс ротора, но требует сложных схем управления с применением микропроцессоров. Драйвер LMD18245 позволяет реализовать такой режим.
Литература
1. Noel McNamara. Simple circuit controls stepper motors // EDN. - 2004. - January 8.
2. UNIPOLAR Stepper Motor Driver (74194) : http://home.cogeco.ca/~rpaisley4/Unipolar.html.
3. BIPOLAR Stepper Motor Driver (74194) : http://home.cogeco.ca/~rpaisley4/Bipolar.html.
4. Rentyuk V. Control stepper motors in both directions// EDN. - 2010. - March 18.
5. L293, L293D QUADRUPLE HALF-H DRIVERS// Texas Instruments Inc. - 2002.
6. LMD18245 ЗА, 55V DMOS Full-Bridge Motor Driver // National Semiconductor Corporation.
PA 10'2010