Крутим шаговый двигатель
Шаговые двигатели достаточны распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует много типов шаговых двигателей, но самыми дружелюбными в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины. Их можно встретить преимущественно в старой технике: принтерах, копирах, дисководах (5-и дюймовых) и еще много где.
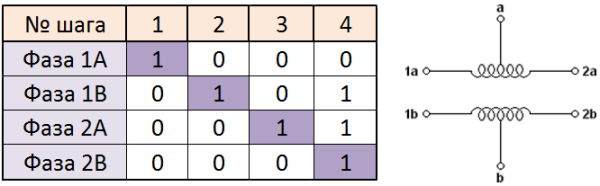

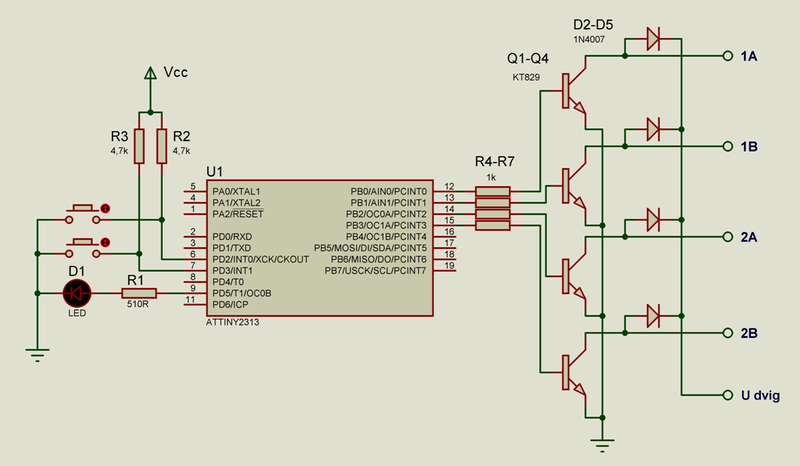
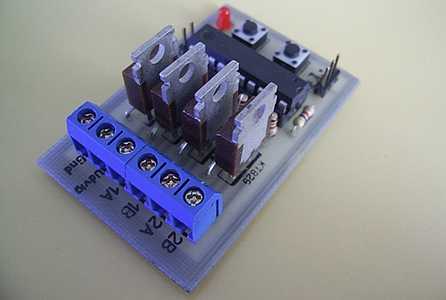
К клемме Udvig подключаются выводы от середин обмоток и туда же подводится напряжение для питания обмоток. Величина напряжения зависит от самого двигателя, для моего например по документации максимальный ток в обмотках 1,5 Ампера, измерив сопротивление обмоток получил 2 Ома, отсюда вывод что напряжение питания не должно превышать 3 В ну или немного больше, учитывая что запитываться будет индуктивная нагрузка.
Кстати диоды D2-D5 стоят для того, чтобы гасить скачки обратного напряжения после закрытия транзистора. Иначе есть вероятность что ЭДС самоиндукции возникающая во время выключения питания обмотки пробъет транзистор.
Код в Bascom-AVR:
$crystal = 4000000
Dim S As Byte 'эта переменная следит за номером шага двигателя
S = 1
On Int0 Knopka1 'даем имена обработчикам внешних прерываний
On Int1 Knopka2
Config Portb = Output 'конфигурируем порт на выход
Config Portd.5 = Output 'конфигурируем ногу для подключения светодиода
Led Alias Portd.5 'присваиваем имя LED выводу 5 порта D
'прерывания будут генерироваться пока на ноге низкий уровень, то есть пока кнопка будет нажата
Config Int0 = Low Level
Config Int1 = Low Level
'разрешаем прерывания
Enable Interrupts
Enable Int0
Enable Int1
'основной цикл программы, просто ждем прерывания
Do
Loop
Knopka1: 'обработчик прерывания первой кнопки
Led = 1 'зажигаем светодиод
Incr S 'увеличим номер шага
If S = 9 Then 'максимально возможный номер шага = 8
S = 1
End If
Select Case S 'выбираем какие обмотки включать в зависимости от номера шага
Case 1 : Portb = &B00000001
Case 2 : Portb = &B00000011
Case 3 : Portb = &B00000010
Case 4 : Portb = &B00000110
Case 5 : Portb = &B00000100
Case 6 : Portb = &B00001100
Case 7 : Portb = &B00001000
Case 8 : Portb = &B00001001
End Select
Waitus 1000 'задержка между шагами
Led = 0 'гасим светодиод
Return
Knopka2: 'обработчик прерывания второй кнопки
Led = 1 'зажигаем светодиод
Decr S 'тут все тоже самое, только в обратном направлении
If S = 0 Then 'минимально возможный номер шага = 1
S = 8
End If
Select Case S
Case 1 : Portb = &B00000001
Case 2 : Portb = &B00000011
Case 3 : Portb = &B00000010
Case 4 : Portb = &B00000110
Case 5 : Portb = &B00000100
Case 6 : Portb = &B00001100
Case 7 : Portb = &B00001000
Case 8 : Portb = &B00001001
End Select
Waitus 1000
Led = 0 'гасим светодиод
Return
End
Изменяя величину
задержки между шагами, можно в больших пределах регулировать скорость
вращения вала. При выбранной мной задержке в 1000 мкс с шаговиком
имеющем 200 шагов на оборот (400 полушагов) скорость вращения получается
примерно 2,5 оборота в секунду.
Скачать файлы к проекту
UPD: Здесь допилил программу, теперь стало возможным управление шаговым двигателем с компьютера.
Прошивка занимает 30% памяти 2313, так-что для модернизации места хватит. Тут дело в другом, для обработки кнопок я использовал внешние прерывания, которых в этом микроконтроллере всего 2. Поэтому если добавлять еще кнопок, нужно переписывать всю программу, примененный алгоритм не пойдет.
Вот как то так
$crystal = 4000000
Dim P As Word
Const F = 1000 'этой константой задаем кол-во полушагов которые сделает двигатель при нажатии на кнопку
Dim S As Byte 'эта переменная следит за номером шага двигателя
S = 1
On Int0 Knopka1 'даем имена обработчикам внешних прерываний
On Int1 Knopka2
Config Portb = Output 'конфигурируем порт на выход
Config Portd.5 = Output 'конфигурируем ногу для подключения светодиода
Led Alias Portd.5 'присваиваем имя LED выводу 5 порта D
'прерывания будут генерироваться пока на ноге низкий уровень, то есть пока кнопка будет нажата
Config Int0 = Low Level
Config Int1 = Low Level
'разрешаем прерывания
Enable Interrupts
Enable Int0
Enable Int1
'основной цикл программы, просто ждем прерывания
Do
Loop
Knopka1: 'обработчик прерывания первой кнопки
Led = 1 'зажигаем светодиод
Do
Incr P
Incr S 'увеличим номер шага
If S = 9 Then 'максимально возможный номер шага = 8
S = 1
End If
Select Case S 'выбираем какие обмотки включать в зависимости от номера шага
Case 1 : Portb = &B00000001
Case 2 : Portb = &B00000011
Case 3 : Portb = &B00000010
Case 4 : Portb = &B00000110
Case 5 : Portb = &B00000100
Case 6 : Portb = &B00001100
Case 7 : Portb = &B00001000
Case 8 : Portb = &B00001001
End Select
Waitus 1000 'задержка между шагами
Loop Until P = F 'когда колво шагов станет равно установленному значению двигатель остановится
P = 0
Led = 0 'гасим светодиод
Gifr = 64
Return
Knopka2: 'обработчик прерывания второй кнопки
Led = 1 'зажигаем светодиод
Do
Incr P
Decr S 'тут все тоже самое, только в обратном направлении
If S = 0 Then 'минимально возможный номер шага = 1
S = 8
End If
Select Case S
Case 1 : Portb = &B00000001
Case 2 : Portb = &B00000011
Case 3 : Portb = &B00000010
Case 4 : Portb = &B00000110
Case 5 : Portb = &B00000100
Case 6 : Portb = &B00001100
Case 7 : Portb = &B00001000
Case 8 : Portb = &B00001001
End Select
Waitus 1000
Loop Until P = F
P = 0
Led = 0 'гасим светодиод
Gifr = 128
Return
End
Подскажите плиз, как правильно изменить программу, чтоб при нажатии одной кнопки двигатель делал определенное кол-во шагов и останавливался ? А при нажатии другой кнопки, возвращался в исходную позицию ?
Config Pind.2 = Input
Config Pind.3 = Input
Shag1 Alias Pind.2
Shag2 Alias Pind.3
потом в тело
Do
If Shag1 = 1 And Shag2 = 1 Then
Portb = &B00000000
End If
Loop
Если вам это не нужно то можно в главном цикле написать
Portb = &B00000000
Loop
и все теперь когда кнопки не нажаты, весь порт находится в выключенном состоянии
суть: если нажать одну из кнопок, то двигатель крутится если отпустить, то одна из обмоток шаговика остается включеной(какая обмотка - зависит от того на каком шаге выключаешь кнопку), надо включить и выключить питание тогда сбрасывается.....
Вижу получил уже посылку с китая?)) как успехи?
Транзистор здесь подключен по ключевой схеме с общим эмиттером, тоесть к эмиттеру подключены две земли (напряжения питания логики и напряжения питания двигателей). Первоначально при отсутствии напряжения на базе транзистор закрыт, и ток через коллектор-эмиттер не идет. При подаче на базу транзистора напряжения, транзистор открывается и начинает пропускать ток. А резистор в базе служит токоограничителем, чтобы не спалить ножку МК.
Не совсем понятно, каким образом пойдет сигнал от МК. Понятно, что нужно просто подключить ножку через резистор к базе. Тогда напряжение с ноги МК поступит на землю 12 вольтовой цепочки? Я правильно понял что, цепочки питания МК и двигателя должны быть изолированны друг от друга? Спасибо.
после кроны стабилизатор на 5 вольт не забыли поставить?