Управление биполярным шаговым двигателем
с помощью микроконтроллера PIC
Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью можно повернуть вал и на определённое число оборотов, потому что N оборотов - это тоже определённый угол, равный 360*N, и, в том числе, на нецелое число оборотов, например на 0.75 оборота, 2.5 оборота, на 3.7 оборота и т.д. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных предметов: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т.д. Естественно такие возможности не могли обойти стороной и радиолюбители. Они с успехом используют шаговики в конструкциях самодельных роботов, самодельных станков с ЧПУ и т.д. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
Итак, что нам понадобится для экспериментов. Во-первых, шаговый двигатель. Я брал 5-ти вольтовый китайский биполярный шаговик с загадочным названием, выдранный из старого 3,5" дисковода, аналог M20SP-GW15. Во-вторых, поскольку обмотки двигателя потребляют значительный ток (в данном случае до 300 мА), то вполне понятно, что подключить шаговик к контроллеру напрямую не удастся, нужен драйвер. В качестве драйвера для биполярных шаговых двигателей обычно используют схему так называемого H-моста или специальную микросхему (в которой всё равно встроен H-мост). Можно конечно ваять самому, но я взял готовую микруху (LB1838) из того же старого дисковода. Собственно, кроме всего вышеописанного, для наших экспериментов также понадобятся PIC-контроллер (был взят PIC12F629, как самый дешёвый) и пара кнопок.
Перед тем, как перейти непосредственно к схеме, давайте немного разберёмся с теорией.
Биполярный шаговый двигатель имеет две обмотки и, соответственно, подключается по четырём проводам. Найти концы обмоток можно простой прозвонкой - концы проводов, относящиеся к одной обмотке, будут между собой звониться, а концы, относящиеся к разным обмоткам, - нет. Концы первой обмотки обозначим буквами "a", "b", а концы второй обмотки буквами "c", "d".
На рассматриваемом экземпляре есть цифровая маркировка контактов возле мотора и цветовая маркировка проводов (бог его знает, может это тоже какой-то стандарт): 1 - красный, 2 - голубой - первая обмотка; 3 - жёлтый, 4 - белый - вторая обмотка.
Для того, чтобы биполярный шаговый двигатель вращался, необходимо запитывать обмотки в порядке, указанном в таблице. Если направление обхода таблицы выбрать сверху вниз по кругу, то двигатель будет вращаться вперёд, если снизу вверх по кругу - двигатель будет вращаться назад:
За один полный цикл двигатель делает четыре шага.
Для правильной работы, должна строго соблюдаться указанная в таблице последовательность коммутаций. То есть, например, после второй комбинации (когда мы подали + на вывод "c" и минус на вывод "d") мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать - на "a" и + на "b"), - тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То, с какой комбинации нужно начинать вращение, определяется тем, какая последняя комбинация подавалась на двигатель перед его выключением (если конечно его руками потом не крутили) и желаемым направлением вращения.
То есть, допустим мы повернули двигатель на 5 шагов вперёд, подавая на него комбинации 2-3-4-1-2, потом обесточили, а потом захотели повернуть ещё на один шаг вперёд. Для этого на обмотки надо подать комбинацию 3. Пусть после этого мы его опять обесточили, а через какое-то время захотели вернуть его на 2 шага назад, тогда нам нужно подать на двигатель комбинации 2-1. И так далее в таком же духе.
Эта таблица, кроме всего прочего, позволяет оценить, что будет происходить с шаговым двигателем, если мы перепутаем порядок подключения обмоток или концы в обмотках.
На этом мы закончим с двигателем и перейдём к драйверу LB1838.
У этой микрухи есть четыре управляющие ноги (IN1, IN2, EN1, EN2), на которые мы как раз и будем подавать сигналы с контроллера, и четыре выходных ноги (Out1, Out2, Out3, Out4), к которым подключаются обмотки двигателя. Обмотки подключаются следующим образом: провод "a" подключается к Out1, провод "b" - к Out2, провод "c" - к Out3, провод "d" - к Out4.
Ниже представлена таблица истинности для микросхемы драйвера (состояние выходов в зависимости от состояния входов):
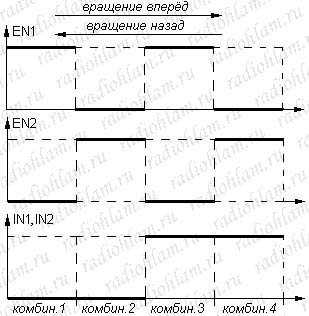
IN1 EN1 Out1 (a) Out2(b) IN2 EN2 Out3(c) Out4(d) Low High + - Low High + - High High - + High High - + X Low откл откл X Low откл откл Теперь давайте нарисуем на диаграмме, какую форму должны иметь сигналы IN1, EN1, IN2, EN2 для одного полного цикла вращения (4 шага), т.е. чтобы на выходах появились последовательно все 4 комбинации подключения обмоток:
Если присмотреться к этой диаграмме, то становится очевидно, что сигналы IN1 и IN2 можно сделать абсолютно одинаковыми, то есть на обе этих ноги можно подавать один и тот же сигнал. В этом случае наша диаграмма будет выглядеть так:
Итак, на последней диаграмме нарисовано, какие комбинации уровней сигналов должны быть на управляющих входах драйвера (EN1, EN2, IN1, IN2) для того, что бы получить соответствующие комбинации подключения обмоток двигателя, а также стрелками указан порядок смены этих комбинаций для обеспечения вращения в нужную сторону.
Вот в общем-то и вся теория. Необходимые комбинации уровней на управляющих входах формируются контроллером (мы будем использовать PIC12F629).
Схема:
Элементы:
R1..R2 = 1 кОм. Когда соответствующая кнопка не нажата - этот резистор подтягивает напряжение на входе контроллера к +5 В (высокий уровень). При нажатии на кнопку напряжение на входе подтягивается к земле (низкий уровень).
С1, С2 = 0,1 мкФ - керамические конденсаторы.
С3 = 470 мкФ х 16В - электролитический конденсатор.
Готовый девайс:
Для экспериментов к контроллеру приделаны две кнопки: КН1 и КН2, программа управления реализует следующий алгоритм: при нажатии кнопки КН1 двигатель поворачивается на один шаг в одну сторону, а при нажатии кнопки КН2 - на один шаг в другую сторону.
Простейшая программа управления (.asm + .hex)
Скачать плату в формате DipTrace 2.0.
Собственно говоря, можно прикрутить сюда программный UART и реализовать управление от компьютера (передавать с компа скорость, количество шагов и направление вращения).