Простой контроллер Шагового Двигателя из компьютерного барахла
Началось мое станкостроение со случайной ссылки на немецкий станок за 2000DM, который на мой взгляд выглядел по детски, однако мог выполнять довольно много занятных функций. В тот момент, меня заинтересовала возможность рисовать платы (это было еще до появления в моей жизни ЛУТ).
В результате протяженных поисков в сети было найдено несколько сайтов посвященных этой проблеме, однако русскоязычных среди них не было ни одного (это было примерно 3 года назад). В общем, в конце концов, я нашел два принтера CM6337 (кстати их выпускал Орловский завод УВМ), откуда и выдрал униполярные шаговые двигатели (Dynasyn 4SHG-023F 39S, аналог ДШИ200-1-1). Параллельно с доставанием принтеров заказал и микросхемы ULN2803A(с буквой А – DIP корпус). Все собрал, запустил. Что получил, а получил дико греющиеся микросхемы ключей, и с трудом вращающийся двигатель. Так как по схеме из Голландии для увеличения тока ключи соединены попарно, то максимальный отдаваемый ток не превышал 1А, в то время как двигателю надо было 2А (кто ж знал что я найду такие прожорливые, как мне тогда показалось, двигатели J ). Кроме того, данные ключи построены по биполярной технологии, для тех кто не в курсе, падение напряжения может быть до 2В (если питание от 5, то фактически половина падает на сопротивлении перехода).
В принципе, для опытов с двигателями от 5” дисководов очень неплохой вариант, можно сделать например плоттер, однако что то более тяжелое чем карандаш (например дремель) ими вряд ли можно тягать.
Решил собрать свою собственную схему из дискретных элементов, благо в одном из принтеров оказалась нетронутой электроника, и я взял оттуда транзисторы КТ829 (Ток до 8А, напряжение до 100В)… Была собрана такая схема…
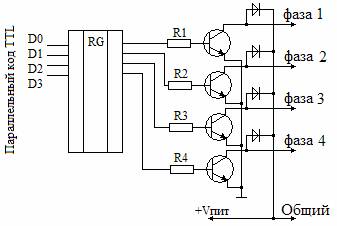
Рис.1 – Схема драйвера для 4х фазного униполярного двигателя.
Сейчас объясню принцип. При подаче логической “1” на один из выводов (на остальных “0”), например на D0, транзистор открывается и ток течет через одну из катушек двигателя, при этом двигатель отрабатывает один шаг. Далее единица подается на следующий вывод D1, а на D0 единица сбрасывается в ноль. Двигатель отрабатывает сладующий шаг. Если подавать ток сразу в две соседние катушки то реализуется режим полушагов (для моих двигателей с углом поворота 1,8’ получается 400 шагов на оборот).
К общему выводу подсоединяются отводы от середины катушек двигателя (их два если проводов шесть). Очень хорошо теория шаговых двигателей описана тут - Шаговые двигатели. Управление шаговым двигателем., тут же приведена схема контроллера ШД на микроконтроллере AVR фирмы Atmel. Честно говоря, мне показалось похоже на забивание гвоздей часами, однако в ней реализована очень хорошая функция как ШИМ регулирование тока обмоток.
Поняв принцип, несложно написать программу управляющую двигателем через LPT порт. Зачем в этой схеме диоды, а за тем, что нагрузка у нас индуктивная, при возникновении ЭДС самоиндукции она разряжается через диод, при этом исключается пробой транзистора, а следовательно и вывод его из строя. Еще одна деталь схемы – регистр RG (я использовал 555ИР33), используется как шинный формирователь, поскольку ток отдаваемый, например LPT портом мал – можно его элементарно спалить, а следовательно, есть возможность спалить весь компьютер.
Схема примитивна, и собрать такое можно минут за 15-20, если есть все детали. Однако у такого принципа управления есть недостаток – так как формирование задержек при задании скорости вращения задается программой относительно внутренних часов компьютера то работать в многозадачной системе (Win) это все не будет! Будут просто теряться шаги (может быть в Windows и есть таймер, но я не в курсе). Второй недостаток – это нестабилизированный ток обмоток, максимальную мощность из двигателя не выжать. Однако по простоте и надежности этот способ меня устраивает, тем более что для того, что бы не рисковать своим Атлоном 2ГГц, я собрал из барахла 486 тарантас, и кроме ДОСа там, в принципе мало, что можно поставить нормальное.
Описанная выше схема работала и в принципе неплоха, но я решил, что можно несколько переделать схему. Применить MOSFETJ ). транзисторы (полевые), выигрыш в том, что можно коммутировать огромные токи (до 75 – 100А), при солидных для шаговых двигателей напряжениях (до 30В), и при этом детали схемы практически не греются, ну если не считать предельных значений (хотел бы я видеть тот шаговый двигатель который съест ток 100А
Как всегда в России возник вопрос, где взять детали. У меня возникла идея – извлечь транзисторы из горелых материнских плат, благо, например Атлоны кушают порядочно и транзисторы там стоят огого. Дал объявление в ФИДО, и получил предложение забрать 3 мат. платы за 100 рублей. Прикинув что в магазине за эти деньги можно от силы купить 3 транзистора, забрал, расковырял и о чудо, хотя они все и были дохлыми, ни один транзистор в цепи питания процессора не пострадал. Так я получил пару десятков полевых транзисторов за сто рублей. Схема, которая получилась в результате, представлена ниже.
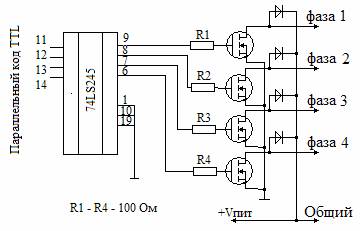
Рис. 2 – Тоже на полевых транзисторах
Отличий в этой схеме немного, в частности была применена микросхема нормального буфера 75LS245 (выпаяна над газовой плитой из 286 материнской платы J ). Диоды можно поставить любые, главное, что бы их максимальное напряжение не было меньше максимального напряжения питания, а предельный ток не меньше тока питания одной фазы. Я поставил диоды КД213A, это 10А и 200В. Возможно это излишне для моих 2х амперных двигателей, однако покупать детали не было смысла, да и запас по току думается лишним не будет. Резисторы служат для ограничения тока перезарядки емкости затворов.
Ниже приводится печатная плата контроллера построенного по такой схеме.
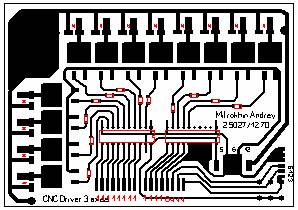
Рис. 3 – Печатная плата.
Печатная плата разведена для поверхностного монтажа на одностороннем текстолите (лень мне что то дырочки сверлить сталоJ). Микросхемы в DIP корпусах паяются с подогнутыми ножками, резисторы SMD с тех же материнок. Файл с разводкой в Sprint-Layout 4.0 прилагается. Можно было бы запаять на плату и разъемы, но лень как говорится - двигатель прогресса, да и при отладке железа удобнее было запаять провода подлиннее.
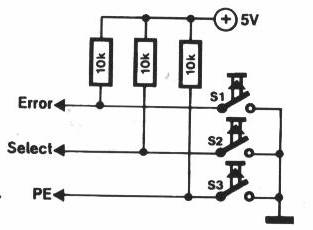
Еще необходимо отметить, что схема снабжена тремя концевиками, на плате справа снизу шесть контактов вертикально, радом с ними посадочные места под три резистора, каждый соединяет один вывод выключателей с +5В. Схема концевиков:
Рис. 4 – Схема концевиков.
Вот так это выглядело у меня в процессе наладки системы:
В результате на представленный контроллер я потратил не более 150 рублей: 100 рублей за материнские платы (при желании можно вообще бесплатно достать) + кусок текстолита, припой и банка хлорного железа в сумме тянут на ~50 рублей, причем хлорного железа останется потом еще много. Думаю считать провода и разъемы смысла не имеет. (Кстати разъем питания отпилен от старого винчестера.)
Так как практически все детали сделаны в домашних условиях, с помощью дрели, напильника, ножовки, рук и такой то матери, то зазоры конечно гигантские, однако модифицировать отдельные узлы в процессе эксплуатации и опытов проще, чем изначально делать все точно.
Если бы на Орловских заводах проточить отдельные детали не стоило бы так дорого, то мне бы конечно проще было бы вычертить все детали в CAD’е, со всеми квалитетами и шероховатостями и отдать на съедение рабочим. Однако знакомых токарей нет… Да и руками как то знаете ли интереснее…
P.S. Хочу высказать свое мнение по поводу негативного отношения автора сайта к советским и Российским двигателям. Советские двигатели ДШИ, вполне себе даже ничего, даже маломощный ДШИ200-1-1. Так что если вам удалось откопать за “пиво” такое добро не спешите выкидывать их, они еще поработают… проверено… Но если же покупать, и разность в стоимости не велика, лучше все таки брать иностранные, поскольку точность у них конечно будет выше.
P.P.S. Е: Если что то я написал не правильно пишите, исправим, но … РАБОТАЕТ…
Митрохин Андрей