ППЗУ обеспечивает универсальность контроллера шагового двигателя
Грегори Джуэлл Фирма Caldisk (Прово, шт. Юта)
На основе одного ППЗУ емкостью 256x4 бит разработан программируемый контроллер шагового двигателя. В данной статье его работа рассматривается на примере четырехтактного шагового двигателя в накопителе на гибком магнитном диске. Однако такую методику можно легко перенести на любое другое устройство.
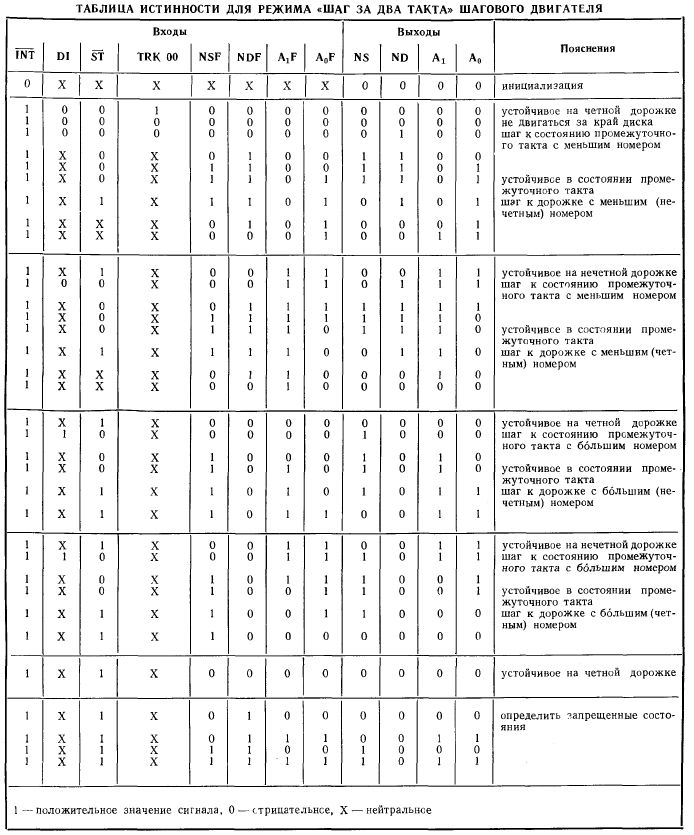
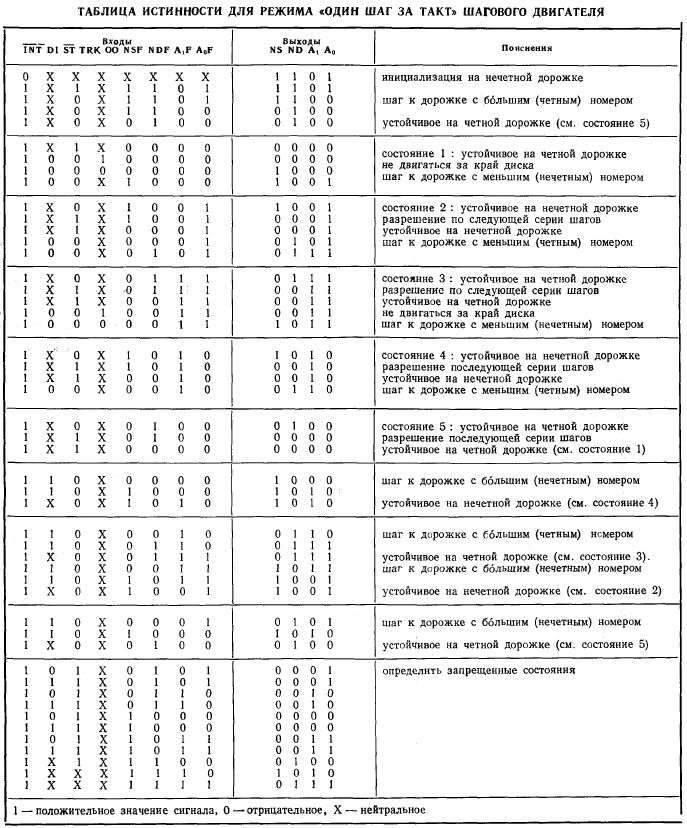
Контроллер занимает четыре из восьми разрядов входного адреса ППЗУ. Они поступают на соответствующие выходы с целью достижения устойчивого состояния только в том случае, когда входной адрес,— состоящий из четырех разрядов непосредственного входа и четырех, формируемых обратной связью,— вырабатывает
выход, равный адресу обратной связи. Таким образом, если один из сигналов непосредственного входа изменяет свое состояние, результирующий выходной сигнал также соответствующим
образом изменяется до тех пор, пока не будет достигнуто устойчивое состояние.
В рабочем варианте предлагаемой конструкции (см. рис.) применены ППЗУ модели 74S287 емкостью 1 кбит, дешифратор типа «2 на 4» модели 25LS2539 и усилители мощности Q1—Q4. Четыре непосредственных входа предназначены
для сигналов инициализации (INT), сдвига на шаг (ST), направления (DI) и указания дорожки 00 (TRK. 00). Входы обратной связи обозначены соответственно NSF, NDF, A1F и A0F. Кроме того, входной сигнал сдвига на шаг представляет собой импульс, формируемый передним фронтом сигнала шага от дискового контроллера.
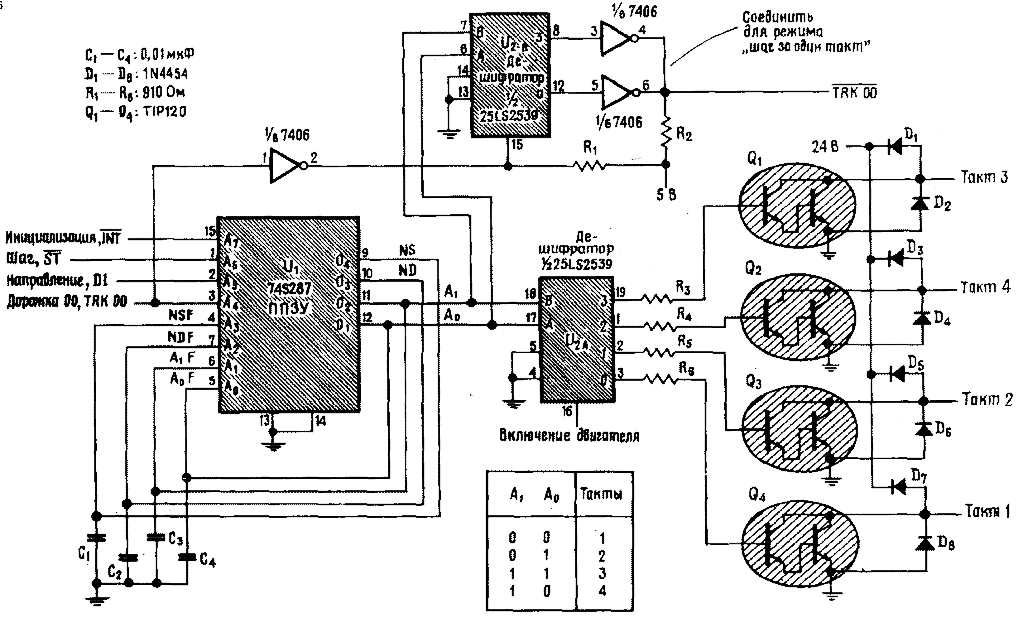
ПЗУ емкостью 256X4 бит, дешифратор и усилители мощности Q1—Q4.
Дешифратор U2_b реализует поиск нулевой дорожки. Приведена таблица соответствия
выходных сигналов A1, A0 и тактов работы двигателя.