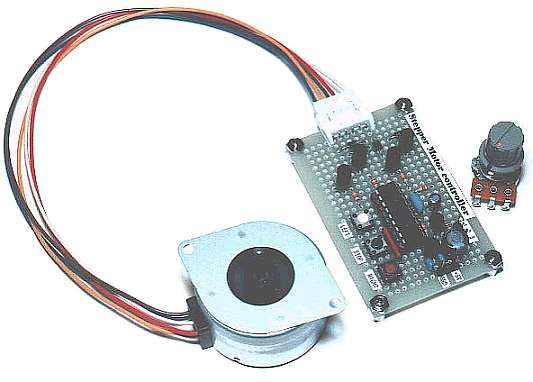
Stepper Motor controller (PIC16F84)
On these pages, I will introduce a control circuit for stepper motor.
The software of this project is adapted to Embedded Systems(Lab13) for 2002 of Cleveland State University.
Operation principle of stepper motor
On this page, I will explain about the operation principle of stepper motor.
There are many kind of stepper motors. Unipolar type, Bipolar type, Single-phase type, Multi-phase type... Single-phase stepper motor is often used for quartz watch.
On this page, I will explain the operation principle of the 2-phase unipolar PM type stepper motor.
In the PM type stepper motor, a permanent magnet is used for rotor and coils are put on stator. The stepper motor model which has 4-poles is shown in the figure on the left. In case of this motor, step angle of the rotor is 90 degrees.
As for four poles, the top and the bottom and either side are a pair.coil,
coil and
coil,
coil correspond respectively. For example,
The turn of the motor is controlled by the electric current which pours into
Clockwise control
Step angle 0 1 0 1 0° 1 0 0 1 90° 1 0 1 0 180° 0 1 1 0 270°
"0" means grounding.
Counterclockwise control
Step angle 0 1 0 1 0° 0 1 1 0 -90° 1 0 1 0 -180° 1 0 0 1 -270°
"0" means grounding.
You can find by the figure, the rotor is stable in the middle of 2 poles of stator. When one side of the stator polarity is changed, the bounce by the magnetism occurs. As a result, the direction of rotor's turn is fixed.
The characteristic of stepper motor is the angle can be correctly controlled and to be stable rotates ( It is due to the reliability of the control signal ). Moreover, because the rotor is fixed by the magnetism in the stationary condition as shown in the principle, the stationary power(Stationary torque) is large. It suits the use to make stop at some angle.
The motor which was used this time is 48 steps and the step angle is 7.5 degrees.
The way of controlling is the same as the previous example completely. It operates when controlling the electric current of
The case of the clockwise control is shown below.
The combination of
Circuit drawing of Stepper Motor controller
Pattern drawing of Stepper Motor controller
(Wiring side)
Pink line shows the external parts.
Motor driving circuit
This is the circuit which drives the coil of stepper motor. There are circuits which drive
Darlington connection-type transistor is used for the drive of the coil. As for the Darlington connection, 2 stages of transistors are connected inside in series. The "hfe" of this transistor is the multiplication of the "hfe" of each transistor inside. In case of 2SD1209K which was used this time, the hfe is over 4000. Because the ratio of the input electric current and the output current is big, the rising edge and the falling edge of the control signal can be made sharp.
The diode to be putting between the collector and the power is for the protection of the transistor. When the transistor becomes OFF from ON, the coil of the motor tries to continue to pass an electric current and generates high voltage. An electric current by this voltage is applied to the diode and the high voltage which applies over the transistor is prevented.
This is the circuit which controls the rotational speed of the motor.
TR1 becomes ON condition when RB7 becomes H level. In this condition, the electric charge of capacitor C1 flows through the transistor and the voltage of the both edges of the capacitor becomes 0 V almost.
When RB7 becomes an L level, the transistor becomes OFF condition. In this condition, the electric current flows through VR1 and R4 into capacitor C1 and the charging to the capacitor begins. The voltage of the both edges of the capacitor becomes high gradually as charging is done. As for the change of this voltage, refer to "Integration circuit".
The voltage of the capacitor is detected by RB5. The software of PIC interrupts the control of the motor until it checks RB5 after making RB7 an L level and RB5 becomes H level. When making the value of VR1 small, the charging time of the capacitor is short and the control of the motor becomes quick. The control of the motor becomes slow when making VR1 big. The speed control range can be changed by changing the value of the capacitor.
This is the circuit for the clockwise rotating, the counterclockwise rotating or stopping a motor. The baton switch of the non lock is used. Pull-up resistor is used for the port to become H level when the switch is OFF. The RB port of PIC16F84A has an internal pull up feature. However, because RB5 is used for the voltage detection of the capacitor at the circuit this time, an internal pull up feature isn't used. If using RA port for the voltage detection of the capacitor, the RB internal pull up feature can be used. The circuit this time put an external pull-up resistor in the relation of the pattern.
4-MHz resonator is used because the circuit this time doesn't need high-speed operation.
The purpose of this circuit is to keep power supply voltage to PIC to 5V when the power of the stepper motor is more than 5V.
Because the operating voltage of the stepper motor to be using this time is about 5V, the power supply voltage is +5V. In this case, the voltage which is applied to PIC becomes less than 5V because of the voltage drop (about 1V) of the regulator. In case of PIC16F84A, the operation is possible even if the power falls to about 3V because the operating voltage range is from 2V to 5.5V. It is enough in the 100-mA type.
Source code file of Stepper Motor controller
Software flow chart of Stepper Motor controller
;******************************************************** ; ; Stepper Motor controller ; ; Author : Seiichi Inoue ;******************************************************** list p=pic16f84a include p16f84a.inc __config _hs_osc & _wdt_off & _pwrte_on & _cp_off ;**************** Label Definition ******************** cblock h'0c' mode ;Operation mode ;0=stop 1=right 2=left count1 ;Wait counter count2 ;Wait counter(for 1msec) endc rb0 equ 0 ;RB0 of PORTB rb1 equ 1 ;RB1 of PORTB rb2 equ 2 ;RB2 of PORTB rb5 equ 5 ;RB5 of PORTB rb7 equ 7 ;RB7 of PORTB ;**************** Program Start *********************** org 0 ;Reset Vector goto init org 4 ;Interrupt Vector clrf intcon ;Clear Interruption reg ;**************** Initial Process ********************* init bsf status,rp0 ;Change to Bank1 clrf trisa ;Set PORTA all OUT movlw b'00100111' ;RB0,1,2.5=IN RB7=OUT movwf trisb ;Set PORTB movlw b'10000000' ;RBPU=1 Pull up not use movwf option_reg ;Set OPTION_REG bcf status,rp0 ;Change to Bank0 clrf mode ;Set mode = stop clrf count1 ;Clear counter clrf count2 ;Clear counter movlw b'00000101' ;Set PORTA initial value movwf porta ;Write PORTA bsf portb,rb7 ;Set RB7 = 1 btfsc portb,rb5 ;RB5 = 0 ? goto $-1 ;No. Wait start ;************* Check switch condition ***************** btfsc portb,rb1 ;RB1(stop key) = ON ? goto check1 ;No. Next clrf mode ;Yes. Set stop mode goto drive ;No. Jump to motor drive check1 btfsc portb,rb2 ;RB2(right key) = ON ? goto check2 ;No. Next movlw d'1' ;Yes. Set right mode movwf mode ;Save mode goto drive ;No. Jump to motor drive check2 btfsc portb,rb0 ;RB0(left key) = ON ? goto drive ;No. Jump to motor drive movlw d'2' ;Yes. Set left mode movwf mode ;Save mode ;******************** Motor drive ********************* drive movf mode,w ;Read mode bz start ;mode = stop bsf portb,rb7 ;Set RB7 = 1 btfsc portb,rb5 ;RB5 = 0 ? goto $-1 ;No. Wait movlw d'5' ;Set loop count(5msec) movwf count1 ;Save loop count loop call timer ;Wait 1msec decfsz count1,f ;count - 1 = 0 ? goto loop ;No. Continue bcf portb,rb7 ;Set RB7 = 0 btfss portb,rb5 ;RB5 = 1 ? goto $-1 ;No. Wait movf porta,w ;Read PORTA sublw b'000000101' ;Check motor position bnz drive2 ;Unmatch movf mode,w ;Read mode sublw d'1' ;Right ? bz drive1 ;Yes. Right movlw b'00001001' ;No. Set Left data goto drive_end ;Jump to PORTA write drive1 movlw b'00000110' ;Set Right data goto drive_end ;Jump to PORTA write ;------- drive2 movf porta,w ;Read PORTA sublw b'000000110' ;Check motor position bnz drive4 ;Unmatch movf mode,w ;Read mode sublw d'1' ;Right ? bz drive3 ;Yes. Right movlw b'00000101' ;No. Set Left data goto drive_end ;Jump to PORTA write drive3 movlw b'00001010' ;Set Right data goto drive_end ;Jump to PORTA write ;------- drive4 movf porta,w ;Read PORTA sublw b'000001010' ;Check motor position bnz drive6 ;Unmatch movf mode,w ;Read mode sublw d'1' ;Right ? bz drive5 ;Yes. Right movlw b'00000110' ;No. Set Left data goto drive_end ;Jump to PORTA write drive5 movlw b'00001001' ;Set Right data goto drive_end ;Jump to PORTA write ;------- drive6 movf porta,w ;Read PORTA sublw b'000001001' ;Check motor position bnz drive8 ;Unmatch movf mode,w ;Read mode sublw d'1' ;Right ? bz drive7 ;Yes. Right movlw b'00001010' ;No. Set Left data goto drive_end ;Jump to PORTA write drive7 movlw b'00000101' ;Set Right data goto drive_end ;Jump to PORTA write ;------- drive8 movlw b'00000101' ;Compulsion setting drive_end movwf porta ;Write PORTA goto start ;Jump to start ;************* 1msec Timer Subroutine ***************** timer movlw d'200' ;Set loop count movwf count2 ;Save loop count tmlp nop ;Time adjust nop ;Time adjust decfsz count2,f ;count - 1 = 0 ? goto tmlp ;No. Continue return ;Yes. Count end ;******************************************************** ; END of Stepper Motor controller ;******************************************************** end
Listing file of Stepper Motor controller
MPASM 02.50.02 Intermediate STEP.ASM 3-9-2001 23:52:45 PAGE 1 LOC OBJECT CODE LINE SOURCE TEXT VALUE 00001 ;******************************************************** 00002 ; 00003 ; Stepper Motor controller 00004 ; 00005 ; Author : Seiichi Inoue 00006 ;******************************************************** 00007 00008 LIST P=PIC16F84A 00009 INCLUDE P16F84A.INC 00001 LIST 00002 ; P16F84A.INC Standard Header File, Version 2.00'(modify) 00134 LIST 2007 3FF2 00010 __CONFIG _HS_OSC & _WDT_OFF & _PWRTE_ON & _CP_OFF 00011 00012 ;**************** Label Definition ******************** 00013 CBLOCK H'0c' 0000000C 00014 MODE ;Operation mode 00015 ;0=stop 1=right 2=left 0000000D 00016 COUNT1 ;Wait counter 0000000E 00017 COUNT2 ;Wait counter(for 1msec) 00018 ENDC 00019 00000000 00020 RB0 EQU 0 ;RB0 of PORTB 00000001 00021 RB1 EQU 1 ;RB1 of PORTB 00000002 00022 RB2 EQU 2 ;RB2 of PORTB 00000005 00023 RB5 EQU 5 ;RB5 of PORTB 00000007 00024 RB7 EQU 7 ;RB7 of PORTB 00025 00026 ;**************** Program Start *********************** 0000 00027 ORG 0 ;Reset Vector 0000 2805 00028 GOTO INIT 0004 00029 ORG 4 ;Interrupt Vector 0004 018B 00030 CLRF INTCON ;Clear Interruption reg 00031 00032 ;**************** Initial Process ********************* 0005 00033 INIT 0005 1683 00034 BSF STATUS,RP0 ;Change to Bank1 0006 0185 00035 CLRF TRISA ;Set PORTA all OUT 0007 3027 00036 MOVLW B'00100111' ;RB0,1,2.5=IN RB7=OUT 0008 0086 00037 MOVWF TRISB ;Set PORTB 0009 3080 00038 MOVLW B'10000000' ;RBPU=1 Pull up not use 000A 0081 00039 MOVWF OPTION_REG ;Set OPTION_REG 000B 1283 00040 BCF STATUS,RP0 ;Change to Bank0 000C 018C 00041 CLRF MODE ;Set mode = stop 000D 018D 00042 CLRF COUNT1 ;Clear counter 000E 018E 00043 CLRF COUNT2 ;Clear counter 000F 3005 00044 MOVLW B'00000101' ;Set PORTA initial value 0010 0085 00045 MOVWF PORTA ;Write PORTA 0011 1786 00046 BSF PORTB,RB7 ;Set RB7 = 1 0012 1A86 00047 BTFSC PORTB,RB5 ;RB5 = 0 ? 0013 2812 00048 GOTO $-1 ;No. Wait 00049 0014 00050 START MPASM 02.50.02 Intermediate STEP.ASM 3-9-2001 23:52:45 PAGE 2 LOC OBJECT CODE LINE SOURCE TEXT VALUE 00051 ;************* Check switch condition ***************** 0014 1886 00052 BTFSC PORTB,RB1 ;RB1(stop key) = ON ? 0015 2818 00053 GOTO CHECK1 ;No. Next 0016 018C 00054 CLRF MODE ;Yes. Set stop mode 0017 2821 00055 GOTO DRIVE ;No. Jump to motor drive 0018 00056 CHECK1 0018 1906 00057 BTFSC PORTB,RB2 ;RB2(right key) = ON ? 0019 281D 00058 GOTO CHECK2 ;No. Next 001A 3001 00059 MOVLW D'1' ;Yes. Set right mode 001B 008C 00060 MOVWF MODE ;Save mode 001C 2821 00061 GOTO DRIVE ;No. Jump to motor drive 001D 00062 CHECK2 001D 1806 00063 BTFSC PORTB,RB0 ;RB0(left key) = ON ? 001E 2821 00064 GOTO DRIVE ;No. Jump to motor drive 001F 3002 00065 MOVLW D'2' ;Yes. Set left mode 0020 008C 00066 MOVWF MODE ;Save mode 00067 00068 ;******************** Motor drive ********************* 0021 00069 DRIVE 0021 080C 00070 MOVF MODE,W ;Read mode 0022 1903 2814 00071 BZ START ;mode = stop 0024 1786 00072 BSF PORTB,RB7 ;Set RB7 = 1 0025 1A86 00073 BTFSC PORTB,RB5 ;RB5 = 0 ? 0026 2825 00074 GOTO $-1 ;No. Wait 0027 3005 00075 MOVLW D'5' ;Set loop count(5msec) 0028 008D 00076 MOVWF COUNT1 ;Save loop count 0029 2062 00077 LOOP CALL TIMER ;Wait 1msec 002A 0B8D 00078 DECFSZ COUNT1,F ;count - 1 = 0 ? 002B 2829 00079 GOTO LOOP ;No. Continue 002C 1386 00080 BCF PORTB,RB7 ;Set RB7 = 0 002D 1E86 00081 BTFSS PORTB,RB5 ;RB5 = 1 ? 002E 282D 00082 GOTO $-1 ;No. Wait 002F 0805 00083 MOVF PORTA,W ;Read PORTA 0030 3C05 00084 SUBLW B'000000101' ;Check motor position 0031 1D03 283B 00085 BNZ DRIVE2 ;Unmatch 0033 080C 00086 MOVF MODE,W ;Read mode 0034 3C01 00087 SUBLW D'1' ;Right ? 0035 1903 2839 00088 BZ DRIVE1 ;Yes. Right 0037 3009 00089 MOVLW B'00001001' ;No. Set Left data 0038 2860 00090 GOTO DRIVE_END ;Jump to PORTA write 0039 00091 DRIVE1 0039 3006 00092 MOVLW B'00000110' ;Set Right data 003A 2860 00093 GOTO DRIVE_END ;Jump to PORTA write 00094 ;------- 003B 00095 DRIVE2 003B 0805 00096 MOVF PORTA,W ;Read PORTA 003C 3C06 00097 SUBLW B'000000110' ;Check motor position 003D 1D03 2847 00098 BNZ DRIVE4 ;Unmatch 003F 080C 00099 MOVF MODE,W ;Read mode 0040 3C01 00100 SUBLW D'1' ;Right ? 0041 1903 2845 00101 BZ DRIVE3 ;Yes. Right 0043 3005 00102 MOVLW B'00000101' ;No. Set Left data 0044 2860 00103 GOTO DRIVE_END ;Jump to PORTA write MPASM 02.50.02 Intermediate STEP.ASM 3-9-2001 23:52:45 PAGE 3 LOC OBJECT CODE LINE SOURCE TEXT VALUE 0045 00104 DRIVE3 0045 300A 00105 MOVLW B'00001010' ;Set Right data 0046 2860 00106 GOTO DRIVE_END ;Jump to PORTA write 00107 ;------- 0047 00108 DRIVE4 0047 0805 00109 MOVF PORTA,W ;Read PORTA 0048 3C0A 00110 SUBLW B'000001010' ;Check motor position 0049 1D03 2853 00111 BNZ DRIVE6 ;Unmatch 004B 080C 00112 MOVF MODE,W ;Read mode 004C 3C01 00113 SUBLW D'1' ;Right ? 004D 1903 2851 00114 BZ DRIVE5 ;Yes. Right 004F 3006 00115 MOVLW B'00000110' ;No. Set Left data 0050 2860 00116 GOTO DRIVE_END ;Jump to PORTA write 0051 00117 DRIVE5 0051 3009 00118 MOVLW B'00001001' ;Set Right data 0052 2860 00119 GOTO DRIVE_END ;Jump to PORTA write 00120 ;------- 0053 00121 DRIVE6 0053 0805 00122 MOVF PORTA,W ;Read PORTA 0054 3C09 00123 SUBLW B'000001001' ;Check motor position 0055 1D03 285F 00124 BNZ DRIVE8 ;Unmatch 0057 080C 00125 MOVF MODE,W ;Read mode 0058 3C01 00126 SUBLW D'1' ;Right ? 0059 1903 285D 00127 BZ DRIVE7 ;Yes. Right 005B 300A 00128 MOVLW B'00001010' ;No. Set Left data 005C 2860 00129 GOTO DRIVE_END ;Jump to PORTA write 005D 00130 DRIVE7 005D 3005 00131 MOVLW B'00000101' ;Set Right data 005E 2860 00132 GOTO DRIVE_END ;Jump to PORTA write 00133 ;------- 005F 00134 DRIVE8 005F 3005 00135 MOVLW B'00000101' ;Compulsion setting 00136 0060 00137 DRIVE_END 0060 0085 00138 MOVWF PORTA ;Write PORTA 0061 2814 00139 GOTO START ;Jump to start 00140 00141 ;************* 1msec Timer Subroutine ***************** 0062 00142 TIMER 0062 30C8 00143 MOVLW D'200' ;Set loop count 0063 008E 00144 MOVWF COUNT2 ;Save loop count 0064 0000 00145 TMLP NOP ;Time adjust 0065 0000 00146 NOP ;Time adjust 0066 0B8E 00147 DECFSZ COUNT2,F ;count - 1 = 0 ? 0067 2864 00148 GOTO TMLP ;No. Continue 0068 0008 00149 RETURN ;Yes. Count end 00150 00151 ;******************************************************** 00152 ; END of Stepper Motor controller 00153 ;******************************************************** 00154 00155 END MPASM 02.50.02 Intermediate STEP.ASM 3-9-2001 23:52:45 PAGE 4 Label list has been deleted. MEMORY USAGE MAP ('X' = Used, '-' = Unused) 0000 : X---XXXXXXXXXXXX XXXXXXXXXXXXXXXX XXXXXXXXXXXXXXXX XXXXXXXXXXXXXXXX 0040 : XXXXXXXXXXXXXXXX XXXXXXXXXXXXXXXX XXXXXXXXX------- ---------------- 2000 : -------X-------- ---------------- ---------------- ---------------- All other memory blocks unused. Program Memory Words Used: 102 Program Memory Words Free: 922 Errors : 0 Warnings : 0 reported, 0 suppressed Messages : 0 reported, 0 suppressed